Presented recent paper RADIUS at RSS 2023
Attended the Robotics: Science and Systems 2023 conference in Daegu Korea to present RADIUS: Risk-Aware trajectory Design In Uncertain Scenarios

I'm Challen Enninful Adu. I am a PhD Candidate at Michigan Robotics working with Prof. Ram Vasudevan and Prof. Talia Moore. I am interested in designing real-world applicable algorithms for motion planning for a variety of robot platforms. In particular my research focuses on real-time robotics algorithms with safety guarantees for robots that operate on human centered environments like mobile robots, manipulators and autonomous vehicles. Additionally, I think about ways to rapidly generate dynamically feasible motion plans for high-dimensional robot systems including underactuated systems (e.g legged robots) and fully actuacted systems (e.g manipulators).
I received my M.S. in Robotics from the University of Michigan. Before joining Michigan, I obtained my Bachelor’s degree in Mechanical Engineering from Lehigh University, where I spent some time working on modular aerial robots with Prof. David Saldana. I am a big fan of soccer (or football as it should be called), legged robots and Jollof rice.
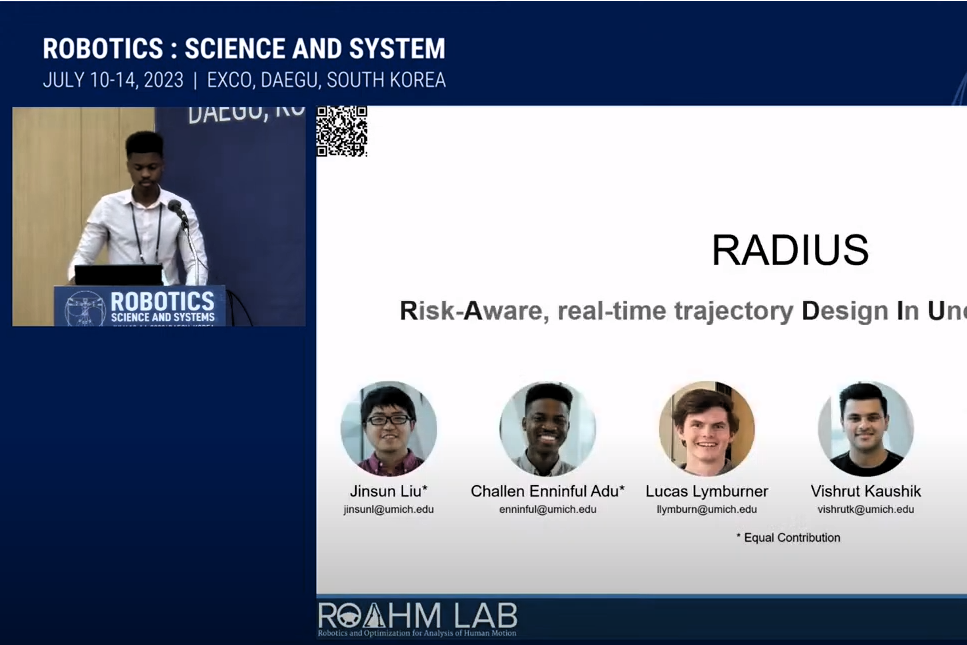
Attended the Robotics: Science and Systems 2023 conference in Daegu Korea to present RADIUS: Risk-Aware trajectory Design In Uncertain Scenarios
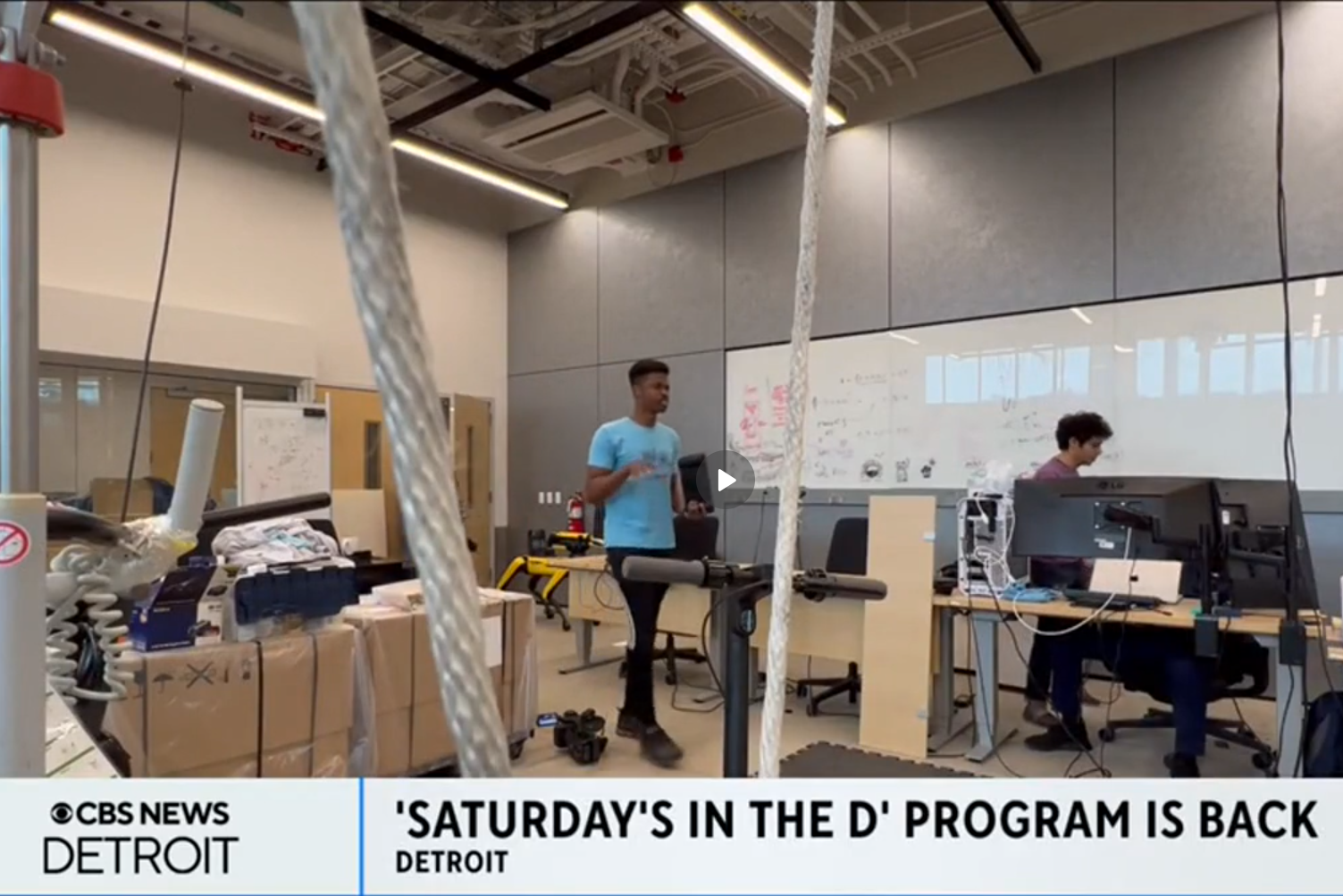
A robotics outreach event with the WISE Girls In Science and Engineering (GISE) summer program organized by a few members of ROAHM lab and I was featured on CBS news.
My recent paper on motion planning in uncertain environments titled "RADIUS: Risk-Aware, Real-Time, Reachability-Based Motion Planning" was accepted to RSS 2023!